TigerBot VII
A full-scale humanoid robot featuring innovative biomechanics and an extensively modular electro-mechanical system design.
A full-scale humanoid robot featuring innovative biomechanics and an extensively modular electromechanical system design.
A Rochester Institue of Technology Multi-Disciplinary Senior Design Project


Multi Agent Bio-Robotics Lab


A Rochester Institue of Technology Multi-Disciplinary Senior Design Project
Multi Agent Bio-Robotics Lab
Evolution of a Humanoid
The TigerBot VII Humanoid Robot is the seventh and final evolution of an iterative research and design project – a collaboration between Rochester Institute of Technology's Multi Agent Bio-Robotics Laboratory and the Multi-Disciplinary Senior Design program. Realizing the original project vision of a full-scale, bipedal robot capable of human-like gait, TigerBot VII features a number of leading biomechanical design concepts providing an innovative research platform for graduate and doctoral studies.
20
Degrees of
Freedom
10
Independent
Sub-Limbs
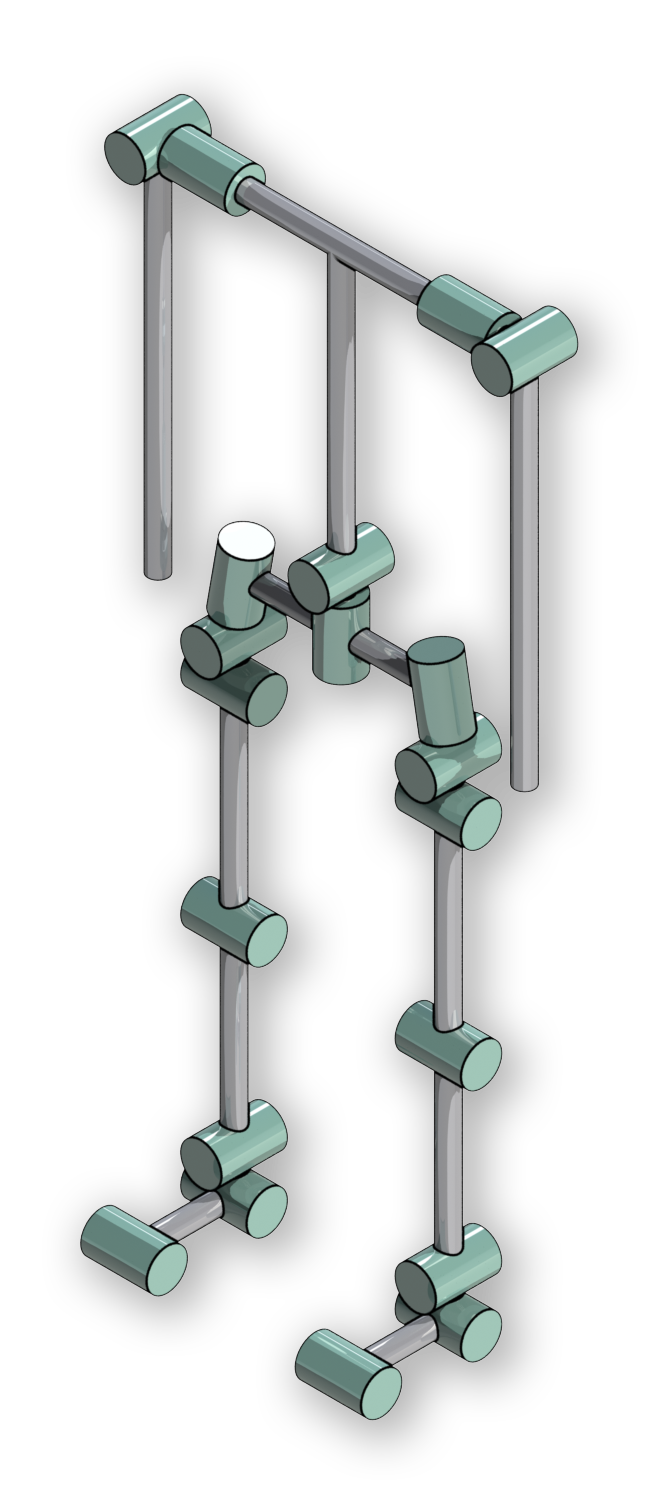


Bio-Kinematic Replication
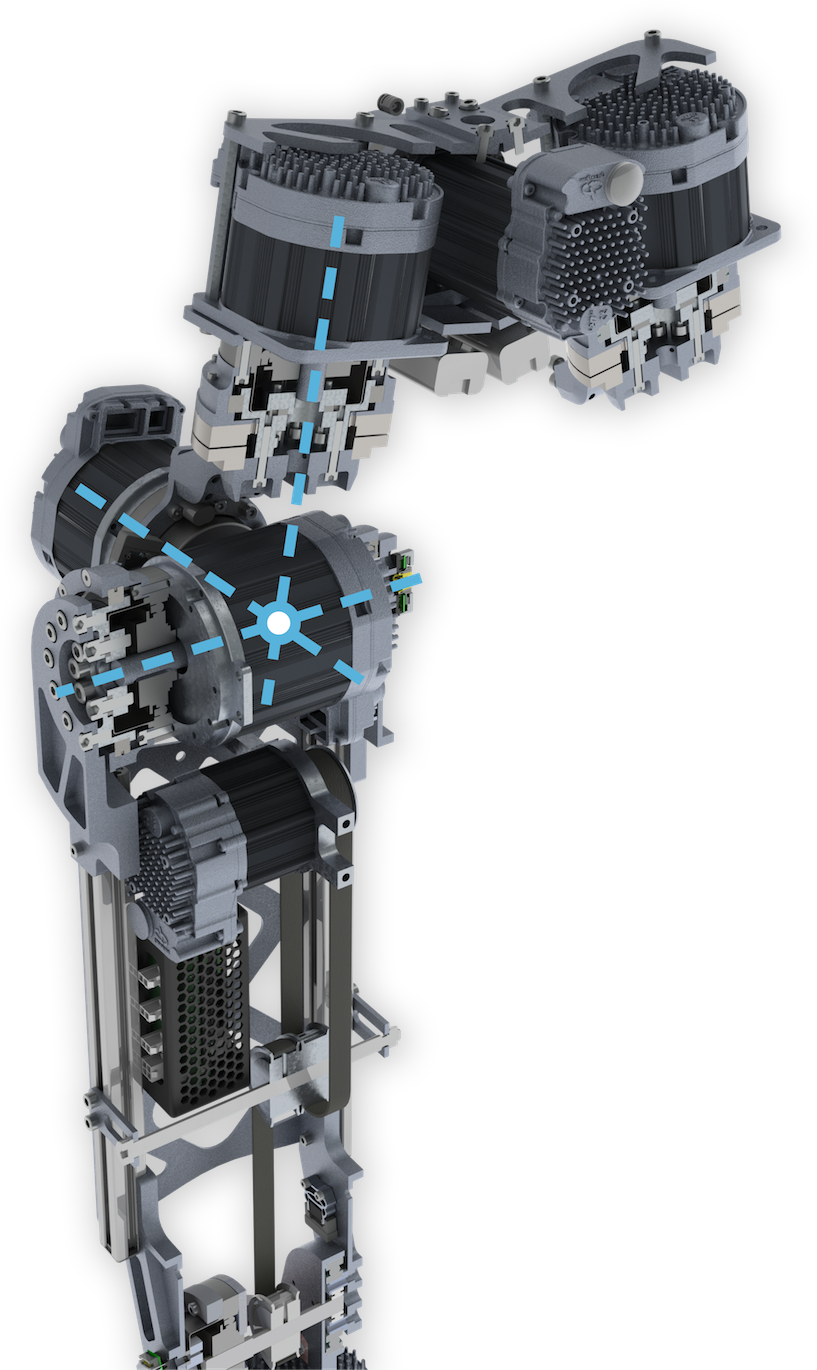
Accurate gait development requires a design that matches the human bio-kinematic range. Current actuator technologies have been unable to replicate the complex 3 degree of freedom ball-joint seen in the human hip and shoulder at high torque ranges. TigerBot VII achieves an equivalent range of motion through three motors oriented orthogonally to one another, with their axes of rotation intersecting at a common point. This design no only provides the basis for more human-like gaits, it greatly simplifies the real-time calculations TigerBot performs when walking.
Convergent Humanoid Design
Recent advancements in actuators and computer modeling has lead to more humanoid system designs converging on biologically-inspired actuation methods. TigerBot VII implements numerous design concepts proven in academia to improve gait and control. In the lower leg, actuation of the ankle is performed by tendon-like transmissions mounted along each shank. Arranging the ankle motors as high in the shank as possible mitigates the moment of inertia seen in the foot while maintaining the same ranges of motion as earlier, less optimized platforms.

Deep Modularity
A high level of modularity was a consistent TigerBot VII design driver that lead to a number of system-level improvements over previous TigerBot platforms. TigerBot VII is comprised of self-contained sub-limbs powered by localized Teensy 3.2 microcontrollers allowing any sub-limb to be quickly removed, operated independently, or even completely replaced if need be. At the heart of TigerBot VII’s modularity is the Extrusion + Terminal design concept in which complex, custom-made parts are limited to the ends of each sub-limb and connected by lightweight extruded aluminum. The use of extrusion between joint terminals increases sub-limb modularity with an easy to modify or replace standardized component.
Distributed Computing
The TigerBot VII electrical system enables a uniquely modular design, providing a distributed control and sensor interfacing package within each sub-limb. With decentralized, low-level controls, sub-limbs can be removed and operated independently for development purposes or replaced outright with minimal changes to the system architecture.

Fast removal enables easy development or outright replacement with minimal changes to the system architecture. The same three-board stack is employed in every sub-limb throughout the system.
Distributed Computing
The TigerBot VII electrical system enables a uniquely modular design, providing a distributed control and sensor interfacing package within each sub-limb. With decentralized, low-level controls, sub-limbs can be removed and operated independently for development purposes or replaced outright with minimal changes to the system architecture. The same three-board stack is employed in every sub-limb throughout the system.
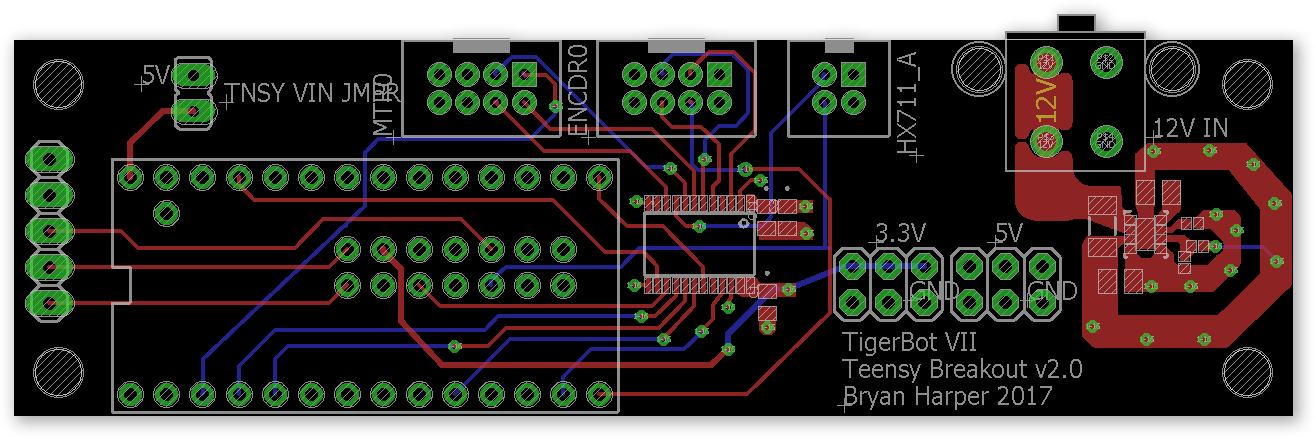
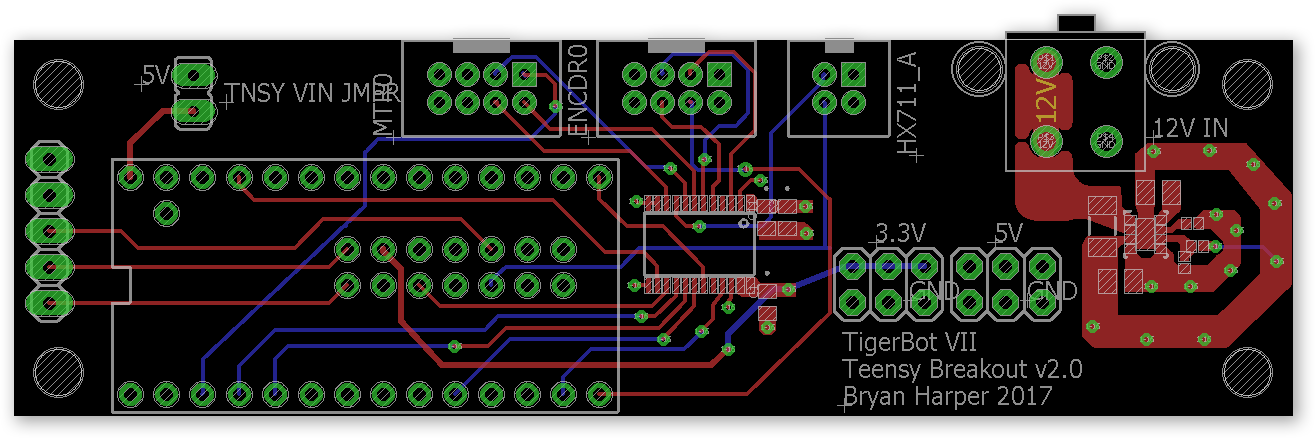
Microcontroller Breakout
- Seats Teensy 3.2 Microcontroller
- Hosts one motor/encoder pinout for development
- Reduces microcontroller upgrade overhead
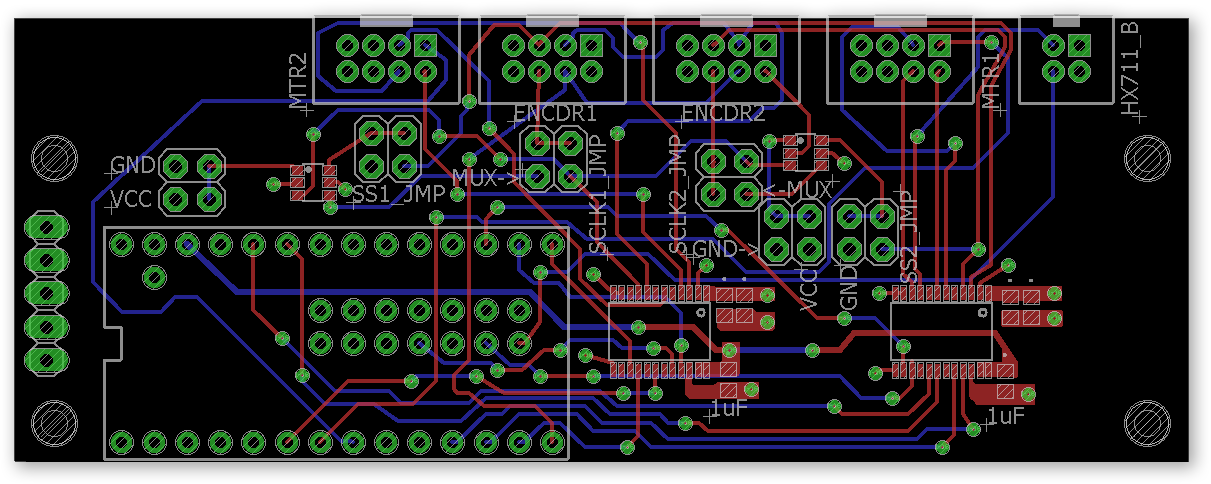
Motor / Encoder Interface
- 3.3V / 5V logic step-up for communication and control signals
- Distributes 75V DC power to three Teknic ClearPath Servos
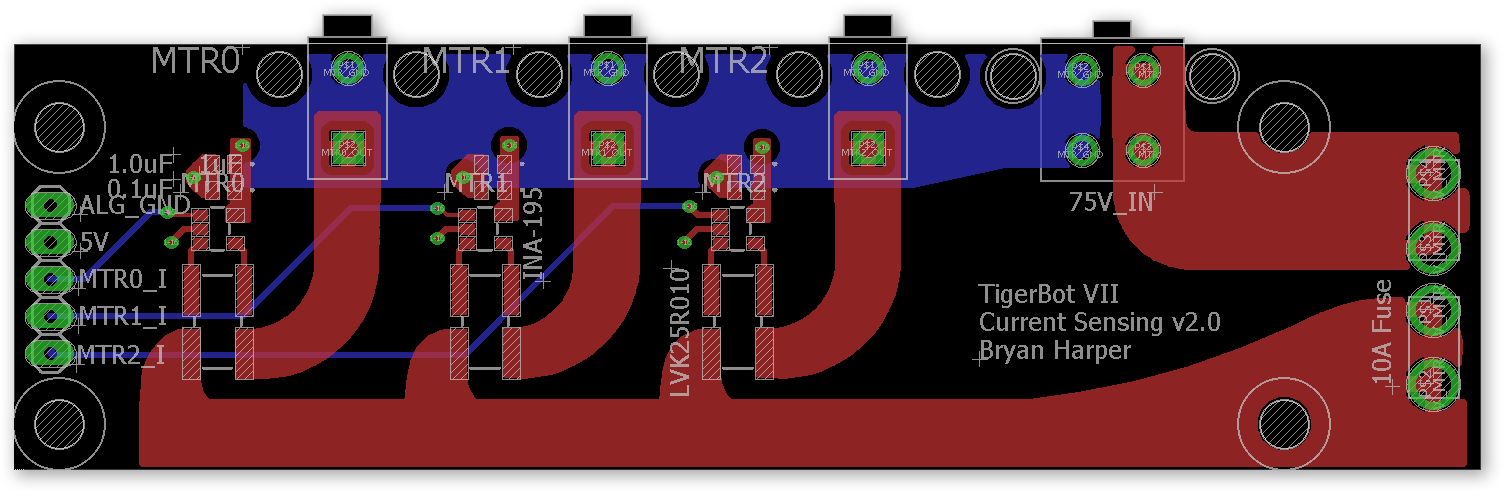
Current Sensing + Power
- Shunt resistors and amplifiers monitor current to classify joint torque
- Blade fuse protects against unexpected current draw (IPC‑2221)
Microcontroller Breakout
- Seats Teensy 3.2 Microcontroller
- Hosts one motor/encoder pinout for development
- Reduces microcontroller upgrade overhead

Motor / Encoder Interface
- 3.3V / 5V logic step-up for communication and control signals
- Distributes 75V DC power to three Teknic ClearPath Servos
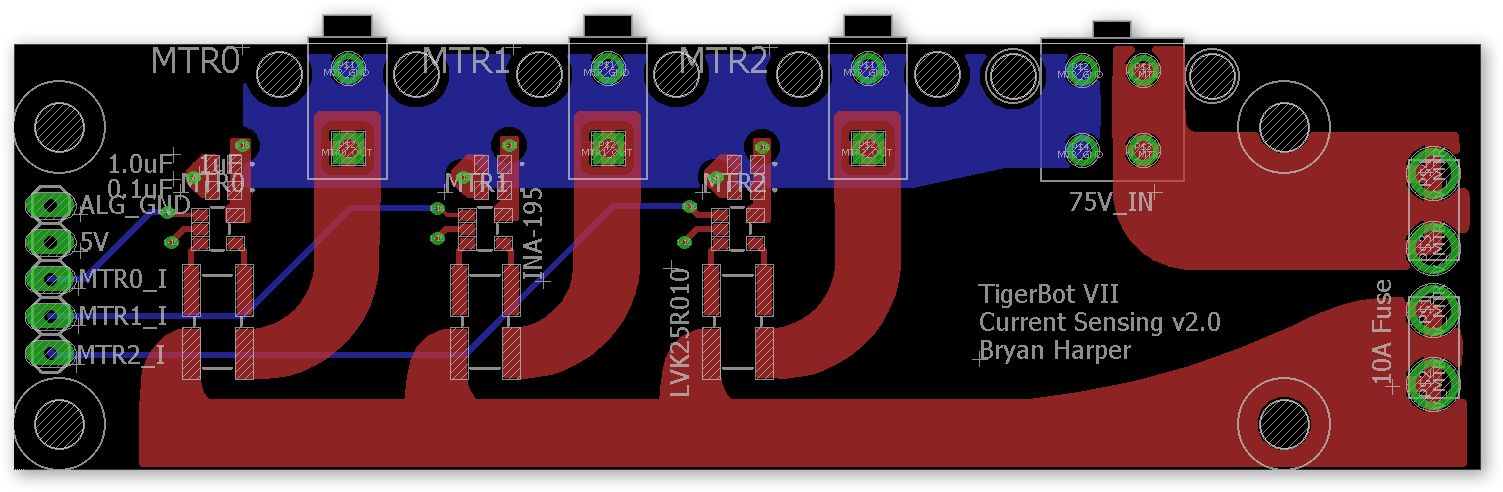
Current Sensing + Power
- Shunt resistors and amplifiers monitor current to classify joint torque
- Blade fuse protects against unexpected current draw (IPC‑2221)
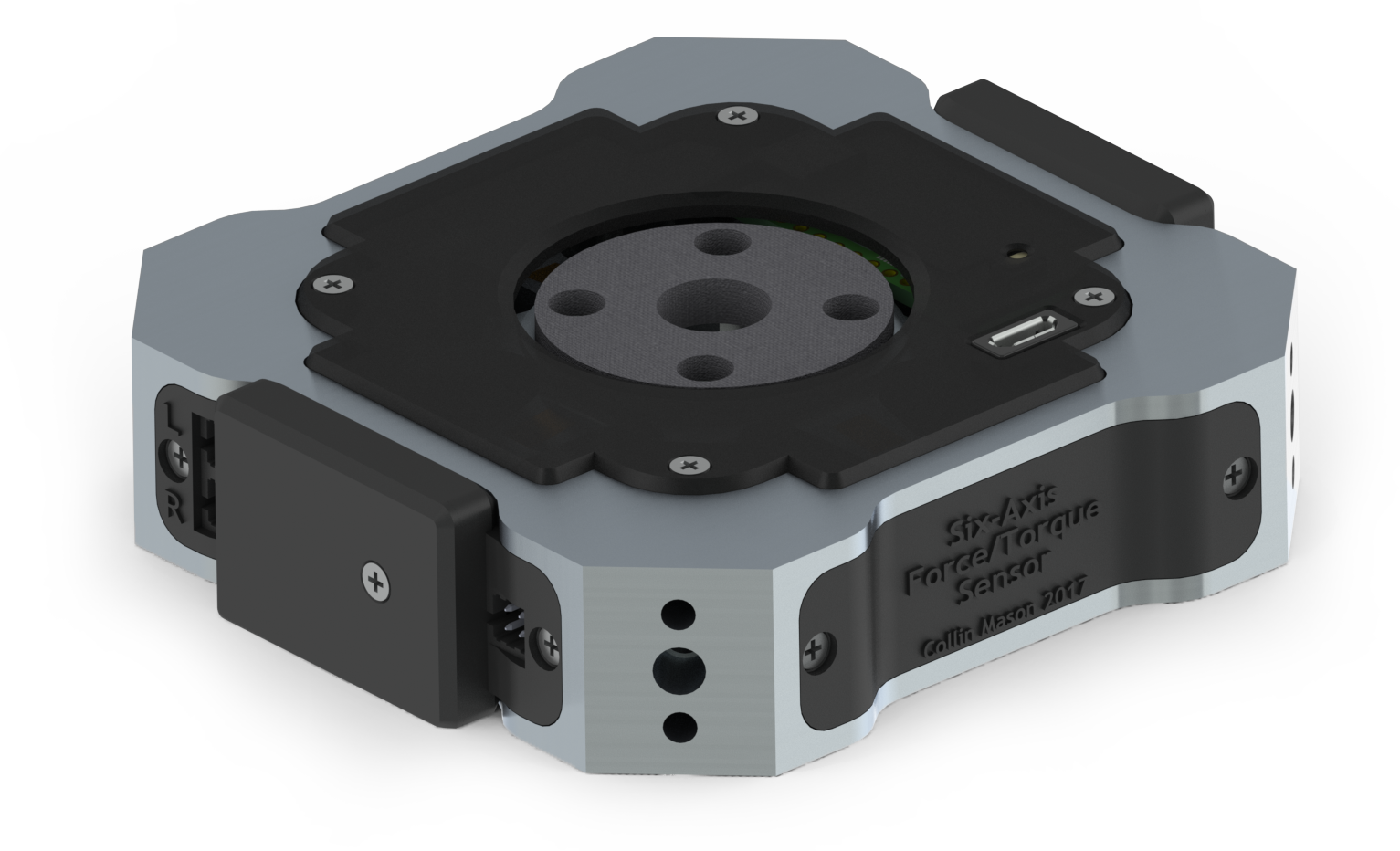
Six-Axis Force / Torque Ankle Sensor
TigerBot VII features a pair of custom-built Six-Axis Force/Torque (SAFT) Sensors as the structural cores of each foot. Carefully optimized sensor geometries takes advantage of elastic deformations in the foot to determine TigerBot’s loading conditions. Employing a modified Maltese-Cross design, each sensor utilizes eight uniaxial strain gauges in half-bridge Wheatstone configurations to measure the reaction forces and moments experienced due to ground loading. Resolving the three Cartesian forces, as well as the moments about each axis, the SAFT blocks provide the primary ground interaction feedback for the TigerBot VII platform.
The SAFT Sensors were designed, developed, and constructed as an Independent Study structured to supplement the TigerBot VII project. Unlike the rest of the humanoid platform, the SAFT Sensors are exclusively the work of BustedTheory creator, Collin Mason.

Fy=1500N
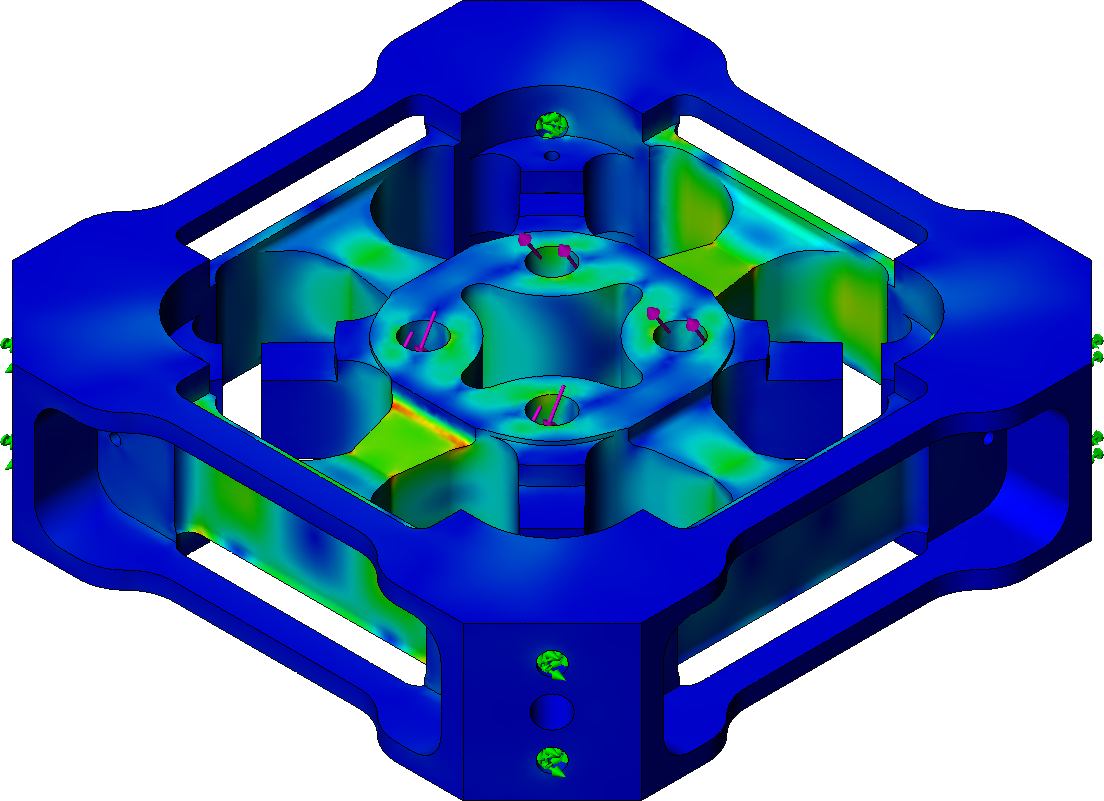
Mz=500N
Strain
TigerBot was featured on
R‧I‧T University News
Watch the Video
A Rochester Institue of Technology
Multi-Disciplinary Senior Design Project


Multi Agent Bio-Robotics Lab
TigerBot VII is the final stage of a joint research project between Rochester Institute of Technology's Multi-Disciplinary Senior Design program and Multi Agent Bio-Robotics Lab. Though BustedTheory primarily serves as a showcase of my personal work, TigerBot VII is an exception that could not have succeeded without the tireless work of my teammates. As Lead Designer and Electromechanical Integration Engineer, I was responsible for approximately 95% of the mechanical system design.
August Mintz
Mechanical Project Manager
Collin Mason
Lead Designer
John Grischuk
Machinist / Simulations
Bryan Harper
Electrical Project Manager
Daniel Watson
PCB Designer
Felisa Sze
Controls / ROS Integration
Under Construction
The Keurig Kold Proof of Concept project page is currently under emergency maintenance due to file corruption of critical backend resources. If you are a Hiring Manager interested in this project, please contact me for a detailed summary of the project.
Project Synopsis
Keurig Kold was a cold beverage dispensing applicance sold by Keurig Green Mountain capable of chilling and carbonating drinks on-demand. While working for Keurig, I developed a modular Proof of Concept that enabled rapid iteration and validation of an improved system design, significantly reducing cost to build.
Under Construction
The AutoReservoir project page is currently under emergency maintenance due to file corruption of critical backend resources. If you are a Hiring Manager interested in this project, please contact me for a detailed summary of the project.
Project Synopsis
AutoReservoir is an automated hydroponics water management system capable of balancing pH and nutrient levels in realtime via PID-controled microdosing. AutoResevoir was conceived and built as a personal project at Rochester Institute of Technology and exhibited at the university's ImagineRIT Innovation Festival.